 English
English Afrikaans
Afrikaans العربية
العربية বাংলা
বাংলা bosanski jezik
bosanski jezik Български
Български Català
Català 粤语
粤语 中文(简体)
中文(简体) 中文(漢字)
中文(漢字) Hrvatski
Hrvatski Čeština
Čeština Nederlands
Nederlands Eesti keel
Eesti keel Suomi
Suomi Français
Français Deutsch
Deutsch Ελληνικά
Ελληνικά हिन्दी; हिंदी
हिन्दी; हिंदी Magyar
Magyar Bahasa Indonesia
Bahasa Indonesia Italiano
Italiano 日本語
日本語 한국어
한국어 Latviešu valoda
Latviešu valoda Lietuvių kalba
Lietuvių kalba македонски јазик
македонски јазик Bahasa Melayu
Bahasa Melayu Norsk
Norsk پارسی
پارسی Polski
Polski Português
Português Română
Română Русский
Русский Cрпски језик
Cрпски језик Slovenčina
Slovenčina Slovenščina
Slovenščina Español
Español Svenska
Svenska ภาษาไทย
ภาษาไทย Türkçe
Türkçe Українська
Українська اردو
اردو Tiếng Việt
Tiếng Việt抵抗温度検出器またはRTDは、温度センサーの単純なタイプかもしれません. これらのデバイスは、金属の抵抗が温度とともに変化するという原則に基づいて機能します. 純粋な金属は一般に抵抗の陽性係数を持っています, つまり、温度が上昇すると抵抗が増加することを意味します. RTDは、広い温度範囲で動作します -200 °Cに +850 °Cと高精度を提供します, 優れた長期安定性, そして再現性.
 MAX31865 RTDプラチナ抵抗温度検出器PT100 & PT1000 |
 RTD PT100 温度伝送器 DC24V マイナス 50 ~ 100 学年 |
 RTD PT100オーブン用の温度センサープローブ |
この記事で, RTDを使用するトレードオフについて説明します, それらに使用される金属, 2種類のRTD, そして、RTDが熱電対と比較されます.
飛び込む前に, RTDの基本をよりよく理解するために、アプリケーションの例を見てみましょう.
RTDアプリケーション図の例
RTDは、自分で出力信号を生成しないパッシブデバイスです. 形 1 単純化されたRTDアプリケーション図を示します.
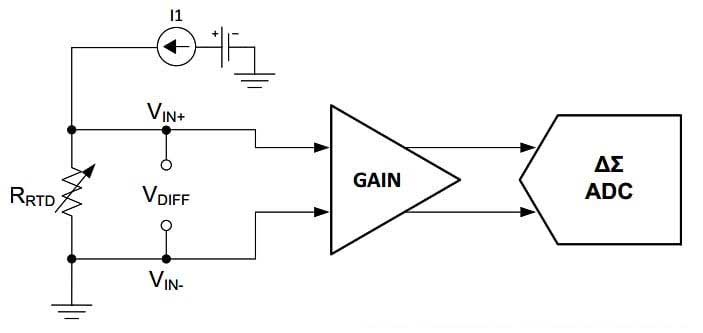
RTDアプリケーションの回路図example.jpeg
形 1. RTDアプリケーション図の例.
励起電流I1は、センサーの温度依存性抵抗を通過します. これにより、励起電流とRTDの抵抗に比例する電圧信号が生成されます。. 次に、RTD全体の電圧が増幅され、ADCに送信されます (アナログからデジタルへのコンバーター) RTD温度の計算に使用できるデジタル出力コードを作成するには.
RTDセンサーの使用のトレードオフ - RTDセンサーの利点と短所
飛び込む前に, RTD信号条件付けの詳細については、今後の記事で説明することに注意することが重要です. この記事のために, RTDサーキットを使用する際に、いくつかの基本的なトレードオフを強調したい.
初め, 励起電流は通常、周りに制限されていることに注意してください 1 自己発熱効果を最小限に抑えるため. 励起電流がRTDを流れるとき, I2Rまたはジュール加熱を生成します. 自己加熱効果は、センサー温度を実際に測定されている周囲温度を超える値に上げることができます. 励起電流を減らすと、自己食事効果を減らすことができます. また、自己食事効果は、RTDが没頭している媒体に依存することにも言及する価値があります. 例えば, 静止空気に配置されたRTDは、流れる水に浸されたRTDよりも重要な自己投資効果を経験する可能性があります.
特定の検出可能な温度変化の場合, RTD電圧の変化は、システムノイズ、およびさまざまなシステムパラメーターのオフセットとドリフトを克服するのに十分な大きさでなければなりません. 自己加熱は励起電流を制限するためです, 十分な大きさの抵抗でRTDを使用する必要があります, したがって、ダウンストリーム信号処理ブロックの大きな電圧を生成する. 大規模なRTD抵抗は測定エラーを減らすために望ましいですが, RTD抵抗が大きくなると応答時間が遅くなるため、抵抗を任意に増加させることはできません.
RTD金属: プラチナ間の違い, 金, およびCopper Rtds
理論的に, あらゆる種類の金属を使用してRTDを構築できます. CW Siemensによって発明された最初のRTD 1860 銅線を使用しました. しかし, Siemensはすぐに、Platinum Rtdsがより広い温度範囲でより正確な結果を生み出したことを発見しました.
今日, Platinum Rtdsは、精密温度測定に最も広く使用されている温度センサーです. プラチナは線形抵抗と温度の関係を持ち、大きな温度範囲で非常に再現可能です. 加えて, プラチナは、空気中のほとんどの汚染ガスと反応しません.
プラチナに加えて, 他の2つの一般的なRTD材料は、ニッケルと銅です. テーブル 1 いくつかの一般的なRTD金属の温度係数と相対導電率を提供します.
 高温PT100プラチナ熱抵抗センサー爆発防止 |
 WZP-130 231 ステンレス鋼プラチナ抵抗PT100温度センサー |
 ベアリング用の熱抵抗PT100温度センサー |
テーブル 1. 一般的なRTD金属の温度係数と相対導電率. BAPIが提供するデータ
| 金属 | 相対導電率 (銅= 100% @ 20 ℃) | 温度抵抗係数 |
| アニールされた銅 | 100% | 0.00393 o/°C |
| 金 | 65% | 0.0034 o/°C |
| 鉄 | 17.70% | 0.005 o/°C |
| ニッケル | 12-16% | 0.006 o/°C |
| 白金 | 15% | 0.0039 o/°C |
| 銀 | 106% | 0.0038 o/°C |
前のセクションで, RTD抵抗が大きいほど測定エラーを減らすことができるかについて説明しました. 銅はより高い導電率を持っています (または同等に, 抵抗が低い) プラチナとニッケルよりも. 特定のセンサーのサイズと励起電流の場合, 銅RTDは、比較的小さな電圧を生成できます. したがって, 銅RTDは、温度変化の小さな変化を測定するのが難しい場合があります. 加えて, 銅はより高い温度で酸化します, したがって、測定範囲も制限されています -200 に +260 ℃. これらの制限にもかかわらず, 銅は、その直線性と低コストのため、一部のアプリケーションでまだ使用されています. 図に示すように 2 下に, 3つの一般的なRTD金属の, 銅は、最も線形抵抗温度特性を持っています.
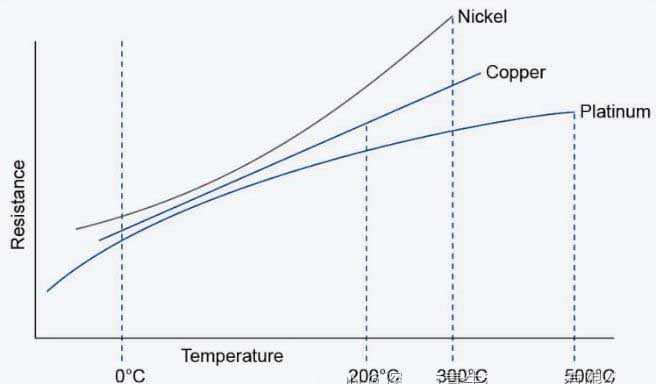
抵抗対. ニッケルの温度特性, 銅, Platinum Rtds.jpeg
形 2. 抵抗対. ニッケルの温度特性, 銅, およびPlatinum Rtds. TE Connectivityの好意による画像
金と銀も抵抗が比較的低く、RTD要素として使用されることはめったにありません. ニッケルは、プラチナの導電率に近い導電率を持っています. 図に見られるように 2, ニッケルは、温度の特定の変化に対して抵抗の変化を提供します.
しかし, ニッケルは温度範囲が低くなります, より大きな非線形性, プラチナよりも長期的なドリフト. さらに, ニッケルの抵抗は、バッチごとに異なります. これらの制限のため, ニッケルは主に消費者製品などの低コストのアプリケーションで使用されます.
一般的なプラチナRTDはPT100およびPT1000です. これらの名前は、センサーの構造で使用される金属の種類を説明しています (プラチナまたはPt) と公称抵抗 0 ℃, それはそうです 100 PT100のωおよび 1000 PT100およびPT1000タイプのω, それぞれ. PT100タイプは、過去により人気がありました; しかし, 今日、この傾向は抵抗RTDの向上に向かっています, より高い抵抗は、追加のコストがほとんどまたはまったくないほど高い感度と解像度を提供するため. 銅とニッケルから作られたRTDは、同様の命名規則を使用しています. テーブル 2 いくつかの一般的なタイプをリストします.
テーブル 2. RTDタイプ, 材料, 温度範囲. アナログデバイスが提供するデータ
| サーマル抵抗型 | 材料 | 範囲 |
| PT100, Pt1000 | 白金 (数字は抵抗です 0 ℃) | -200 °Cに +850 ℃ |
| PT200, Pt500 | 白金 (数字は抵抗です 0 ℃) | -200 °Cに +850 ℃ |
| CU10, CU100 | 銅 (数字は抵抗です 0 ℃) | -100 °Cに +260 ℃ |
| ニッケル 120 | ニッケル (数字は抵抗です 0 ℃) | -80 °Cに +260 ℃ |
使用される金属の種類に加えて, RTDの機械的構造もセンサーの性能に影響します. RTDは、2つの基本タイプに分割できます: 薄膜とワイヤーワウンド. これらの2つのタイプについては、次のセクションで説明します.
薄膜対. Wirewound Rtds
RTDの議論をさらに促進する, 2つのタイプを調べてみましょう: 薄膜とワイヤーワウンド.
Thin Film Rtdの基本
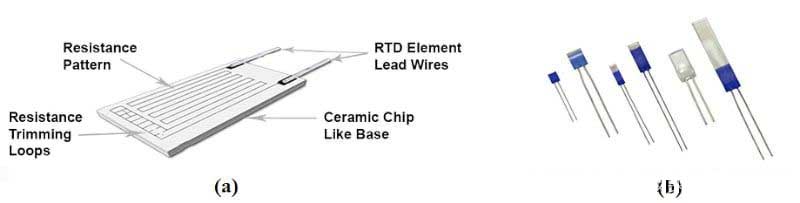
Thin Film Rtd Display Structure.jpeg
薄膜タイプの構造を図に示します 3(ある).
形 3. 薄膜RTDの例, どこ (ある) 構造を表示します (b) さまざまな全体的なタイプが表示されます. 画像 (修正) Evosensorsの厚意により
Thin Film Rtdで, プラチナの薄い層がセラミック基板に堆積します. これに続いて、非常に高温アニーリングと安定化が続きます, 要素全体を覆う薄い保護ガラス層. 図に示すトリミング領域 3(ある) 製造された抵抗を指定されたターゲット値に調整するために使用されます.
Thin Film Rtdsは、組み立ての時間と生産コストを大幅に削減する比較的新しいテクノロジーに依存しています. ワイヤーワウンドタイプと比較して, 次のセクションで詳細に探索します, 薄膜RTDは、衝撃や振動による損傷により耐性があります. さらに, Thin-Film Rtdsは、比較的小さな領域の大きな抵抗に対応できます. 例えば, ある 1.6 mm by 2.6 MMセンサーは、の抵抗を生成するのに十分な領域を提供します 1000 おお. サイズが小さいため, Thin-Film RTDは、温度変化に迅速に応答できます. これらのデバイスは、多くの汎用アプリケーションに適しています. このタイプの欠点は、長期的な安定性が比較的低く、温度範囲が狭くなっています.
Wirewound Rtds
ワイヤーワウンドRTDの建設
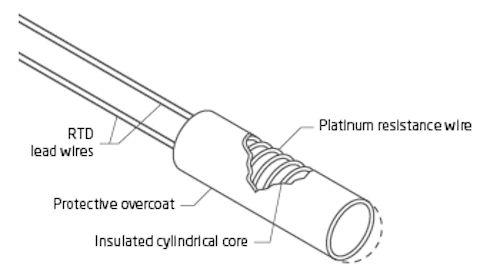
形 4. 基本的なワイヤワウンドRTDの構築の概要. PR Electronicsの厚意により画像
このタイプのRTDは、セラミックまたはガラスのコアの周りにプラチナの長さを曲げることによって作られています. 要素全体は通常、保護目的でセラミックまたはガラスチューブ内にカプセル化されています. セラミックコアを備えたRTDは、非常に高温の測定に適しています. Wirewound RTDは、一般に薄膜タイプよりも正確です. しかし, それらはより高価で、振動によってより簡単に損傷します.
プラチナワイヤのひずみを最小限に抑えるため, センサー構造で使用される材料の熱膨張係数は、プラチナのそれと一致するはずです. 同一の熱膨張係数は、RTD要素の長期応力によって引き起こされる抵抗の変化を最小限に抑える, したがって、センサーの再現性と安定性を改善します.
RTD対. 熱電プロパティ
RTD温度センサーに関するこの会話をまとめます, RTDと熱電対センサーの簡単な比較は次のとおりです.
熱電対は、2つの接合部の温度差に比例する電圧を生成します. 熱電対は自動運転であり、外部の励起は必要ありません, 一方、RTDベースの温度測定では、励起電流または電圧が必要です. 熱電対出力コールドジャンクションとホットジャンクションの温度差を指定します, したがって、熱電対アプリケーションではコールドジャンクション補償が必要です. 一方で, RTDアプリケーションにはコールドジャンクション補償は必要ありません, より単純な測定システムになります.
通常、熱電対は使用されます -184 °Cに 2300 °Cの範囲, 一方、RTDは測定できます -200 °Cに +850 ℃. ただし、RTDは通常、熱電対よりも正確です, それらは熱心に約2〜3倍高価です. 別の違いは、RTDが熱電対よりも線形であり、優れた長期の安定性を示すことです. 熱電対で, センサー材料の化学変化は、長期的な安定性を低下させ、センサーの読み取りを漂流させる可能性があります.
