 English
English Afrikaans
Afrikaans العربية
العربية বাংলা
বাংলা bosanski jezik
bosanski jezik Български
Български Català
Català 粤语
粤语 中文(简体)
中文(简体) 中文(漢字)
中文(漢字) Hrvatski
Hrvatski Čeština
Čeština Nederlands
Nederlands Eesti keel
Eesti keel Suomi
Suomi Français
Français Deutsch
Deutsch Ελληνικά
Ελληνικά हिन्दी; हिंदी
हिन्दी; हिंदी Magyar
Magyar Bahasa Indonesia
Bahasa Indonesia Italiano
Italiano 日本語
日本語 한국어
한국어 Latviešu valoda
Latviešu valoda Lietuvių kalba
Lietuvių kalba македонски јазик
македонски јазик Bahasa Melayu
Bahasa Melayu Norsk
Norsk پارسی
پارسی Polski
Polski Português
Português Română
Română Русский
Русский Cрпски језик
Cрпски језик Slovenčina
Slovenčina Slovenščina
Slovenščina Español
Español Svenska
Svenska ภาษาไทย
ภาษาไทย Türkçe
Türkçe Українська
Українська اردو
اردو Tiếng Việt
Tiếng Việt
2-traat, 3-traat või 4-juhtmeline Pt100, 500 Pt, Pt1000 andurid on suure täpsusega plaatinaelementidel põhinevad temperatuuriandurid, stabiilsus ja lineaarsus, ja neid kasutatakse laialdaselt valdkondades, mis nõuavad täpset temperatuuri mõõtmist. A “PT100 termotakisti temperatuuri mõõtmise süsteem” viitab süsteemile, mis kasutab PT100 andurit, teatud tüüpi takistustemperatuuri detektor (RTD), temperatuuri mõõtmiseks, tuvastades selle elektritakistuse muutused, mis on otseselt proportsionaalsed temperatuuriga; “PT” tähistab plaatinat, ja “100” näitab, et anduri takistus on 100 oomi temperatuuril 0 °C, mistõttu on see väga täpne ja stabiilne meetod temperatuuri mõõtmiseks laias vahemikus.
Plaatinatakisteid kasutatakse laialdaselt keskmise temperatuurivahemikus (-200~650 ℃). Hetkel, turul on metallist plaatinast valmistatud standardsed temperatuuri mõõtvad termotakistid, näiteks Pt100, 500 Pt, 1000 Pt, jne.
Saage aru PT100 tööpõhimõttest: PT100 on Pt takisti temperatuuriandur. Tööpõhimõte põhineb takisti termilisel efektil. Selle takistuse väärtus muutub temperatuuri muutudes. See muutus on lineaarne. 0 ℃ juures, PT100 takistuse väärtus on 100 oomi. Kui temperatuur tõuseb, vastavalt suureneb ka takistuse väärtus, nii et temperatuuri saab täpselt järeldada takistuse väärtuse mõõtmisega.
 Kõrge täpsusega 4-juhtmeline A-klassi PT100 temperatuurimõõtmissüsteem |
 2-traat PT100 plaatina takistuse temperatuuri kontrollsondi temperatuuri mõõtmise süsteem |
 3-traat PT100 termotakisti anduri temperatuuri mõõtmise süsteem |
Valige sobiv juhtmestiku meetod: Üldiselt, 2-traat, 3-võib kasutada traat- või 4-juhtmelisi juhtmestiku meetodeid.
Silla väljundpinge signaal
Põhipunktid PT100 süsteemi kohta:
Anduri põhimõte:
PT100 andur on valmistatud plaatinatraadist, mille elektritakistus muutub temperatuurikõikumiste korral ennustatavalt.
Mõõtmismeetod:
Kui vool juhitakse läbi PT100, mõõdetakse anduri pingelangust, mis seejärel teisendatakse temperatuuriks, tuginedes teadaolevale seosele takistuse ja temperatuuri vahel.
Lai rakendus:
PT100 andureid kasutatakse tavaliselt tööstuslikes protsessides, laborid, ja muud rakendused, kus nende suure täpsuse ja stabiilsuse tõttu on vaja täpset temperatuuri mõõtmist.
PT100 süsteemi komponendid:
PT100 anduri sond:
Tegelik sensorelement, tavaliselt plaatinatraat, mis on mähitud ümber keraamilise südamiku, mis sisestatakse mõõdetavasse keskkonda.
Signaali konditsioneerimisahel:
Elektroonika, mis võimendab ja muudab PT100 väikese takistuse muutuse mõõdetavaks pingesignaaliks.
Kuvamis- või andmehõivesüsteem:
Seade, mis kuvab mõõdetud temperatuuri või salvestab andmed analüüsiks.
PT100 süsteemi kasutamise eelised:
Kõrge täpsus: Seda peetakse üheks kõige täpsemaks saadaolevaks temperatuurianduriks.
Lai temperatuurivahemik: Saab mõõta temperatuure vahemikus -200°C kuni 850°C olenevalt anduri konstruktsioonist.
Hea lineaarsus: Takistuse ja temperatuuri suhe on väga lineaarne, mis muudab andmete tõlgendamise lihtsaks.
Stabiilsus: Plaatina on väga stabiilne materjal, tagades aja jooksul ühtsed näidud.
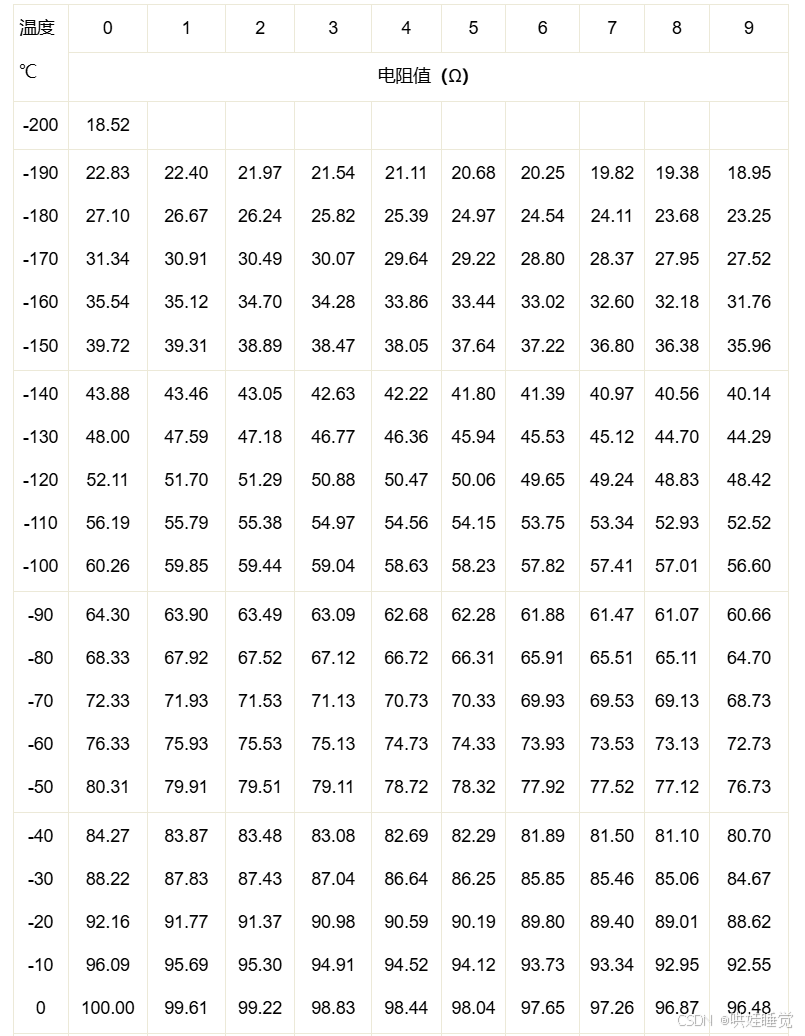
Pt100 soojustakistuse indekseerimise tabel
Plaatinatakisti PT100 kolm juhtmestiku meetodit on põhimõtteliselt erinevad: 2-traati ja 3-juhtmelist mõõdetakse sillameetodil, ning lõpus on toodud temperatuuri väärtuse ja analoogväljundi väärtuse vaheline seos. 4-juhtmel pole silda. See saadetakse täielikult pideva vooluallika kaudu, mõõdetuna voltmeetriga, ja lõpuks annab mõõdetud takistuse väärtuse, mida on raske ja kulukas kasutada.
Kuna PT100-l on väike takistusväärtus ja kõrge tundlikkus, juhtjuhtme takistuse väärtust ei saa eirata. 3-juhtmelise ühenduse kasutamine võib kõrvaldada juhtjuhtme takistusest põhjustatud mõõtmisvea.
2-juhtmelisel süsteemil on halb mõõtmistäpsus; 3-juhtmeline süsteem on parema täpsusega; 4-juhtmeline süsteem on kõrge mõõtmistäpsusega, kuid vajab rohkem juhtmeid.
Peame teadma ainult PT100 temperatuuri olekut silla väljundpinge signaali põhjal. Kui PT100 takistuse väärtus ei ole võrdne Rx takistuse väärtusega, sild väljastab diferentsiaalrõhu signaali, mis on väga väike. Kuna temperatuurianduri väljundsignaal on üldiselt väga nõrk, selle võimendamiseks või hõlpsasti edastatavasse vormi muundamiseks on vaja signaali konditsioneerimise ja muundamise ahelat, protsessi, salvestada ja kuvada. Mõõdetud signaali koguse väike muutus tuleb teisendada elektrisignaaliks. Alalisvoolu signaali võimendamisel, opvõimendi isetriivi ja tasakaalustamata pinget ei saa eirata operatiivvõimendi läbimisel. Pärast võimendamist, saab väljastada soovitud suurusega pingesignaali.
Plaatinatakisti takistuse väärtuse saab saada vooluahela arvutamise või multimeetri mõõtmise teel. Kui me teame PT100 takistuse väärtust, saame mõõta ja arvutada temperatuuri takistuse väärtuse järgi.
Kasutage andmetöötluseks sobivaid algoritme: Kasutage temperatuuri arvutamiseks programmeerimise teel teadaolevat temperatuuri ja takistuse seost. Arvestades, et PT100 takistuse ja temperatuuri suhe on mittelineaarne, eriti madala või kõrge temperatuuriga piirkondades, täpsuse parandamiseks võib vaja minna keerukamaid algoritme.
Keskkonnategurite mõju: Toimivust võivad mõjutada keskkonnategurid, nagu elektromagnetilised häired, mehaaniline vibratsioon, ja niiskus.
On kolm levinumat temperatuuri mõõtmise arvutusmeetodit:
Temperatuuri mõõtmise arvutusmeetod 1:
Kui täpset temperatuuri pole vaja, temperatuur tõuseb 2,5 ℃ võrra iga oomilise PT100 soojustakisti takistuse väärtuse suurenemise korral (kasutatakse madalatel temperatuuridel). Temperatuurianduri PT100 takistuse väärtus on 100 kui see on 0 ℃, seega ligikaudne temperatuur sel ajal = (PT100 takistuse väärtus-100)*2.5.
Temperatuuri mõõtmise arvutusmeetod 2:
Plaatinatakisti takistuse väärtuse ja temperatuuri vaheline seos
Vahemikus 0~850 ℃: Rt = R0(1+At+Bt2);
Vahemikus -200~0 ℃: Rt = R0[1+At+Bt2+C(t-100)3];
Rt tähistab plaatinatakisti takistuse väärtust temperatuuril t℃;
R0 tähistab plaatinatakisti takistuse väärtust temperatuuril 0 ℃;
A, B, C on konstandid, A = 3,96847 × 10-3/℃; B = -5,847 × 10-7 / ℃; C = -4,22 × 10-12/℃;
Termotakisti jaoks, mis vastab ülaltoodud suhtele, selle temperatuuritegur on umbes 3,9 × 10-3/℃.
Ülaltoodud valemi kaudu, temperatuuri saab täpselt lahendada vastavalt takistuse väärtusele, kuid selle meetodi suure arvutuse tõttu, see ei ole selle katse jaoks soovitatav.
Kolmas temperatuuri arvutamise meetod:
PT100-l on hea lineaarne seos temperatuuriga ning see sobib keskmise ja madala temperatuuri temperatuuri mõõtmiseks. PT100 takistuse väärtusel erinevatel temperatuuridel on üks-ühele vastav mõõteskaala, nagu on näidatud alloleval joonisel, mis suudab intuitiivselt kuvada vastavat seost erinevate temperatuuride ja PT100 takistuse väärtuse vahel.
Temperatuuri saab teada, kontrollides vastavat takistuse väärtust PT100 skaala kaudu.
Pt100 soojustakisti skaala
Selles artiklis kavandatud temperatuurimõõteseade PT100 kasutab tavaliselt kasutatavat odavat neljasuunalist operatiivvõimendit LM324, et viia lõpule seadme toiteahela ja kolme toiminguga instrumendivõimendi vooluring..
1.1 Pingeallika ahel
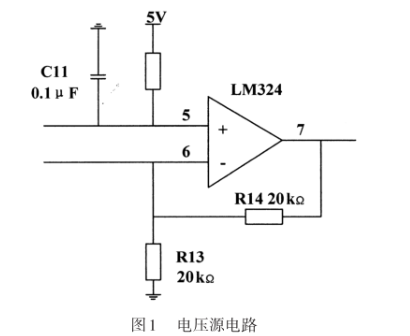
Pt100 soojustakisti anduri pingeallika ahel
Ahel joonisel 1 on tavaline proportsionaalne tööahel. Lineaarpiirkonnas töötava ideaalse operatiivvõimendi analüüsi järgi, virtuaalse lühi- ja virtuaalpausi põhimõttel, see saadakse:
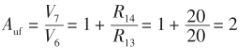
Wheatstone'i silla arvutusahela valem
), siis suletud ahelaga pingevõimendustegur on 2 korda, ja siis saadakse V= 10V, ja seda kasutatakse Wheatstone'i sillaahela stabiilse toitepingena.
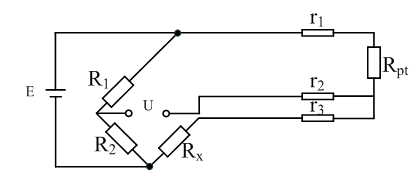
1.2 Wheatstone'i silla ja PT100 kolmejuhtmeline ühendus.
Ülaltoodud joonis on Wheatstone'i sild. Silla tasakaalustamise tingimus on, et punktide B ja D potentsiaalid on võrdsed. Nii et kui sild on tasakaalus, nii kaua kui R1, R2 (tavaliselt fikseeritud väärtused) ja R0 (tavaliselt reguleeritavad väärtused) loetakse, on võimalik saada mõõdetav takistus Rx. R1/R2=M, helistas “kordaja”.
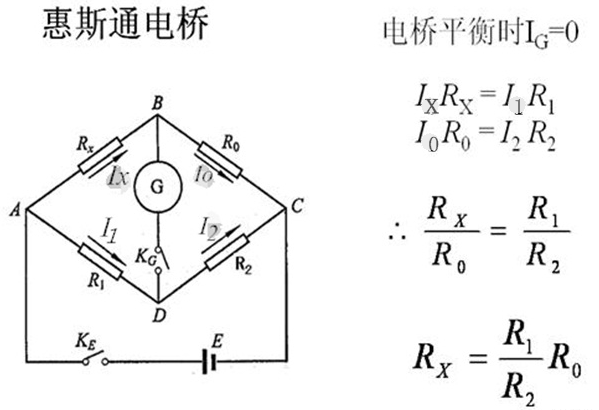
Wheatstone'i sild ja PT100 kolmejuhtmeline ühendusmeetod
Vastavalt PT100 temperatuuri mõõtmise põhimõttele, PT100 takistuse väärtus peab olema õigesti teada, kuid takistuse väärtust ei saa otse mõõta, seega on vaja konversiooniahelat. Takistuse väärtus teisendatakse pingesignaaliks, mida mikrokontroller suudab tuvastada”. Wheatstone'i sillaahel on instrument, mis suudab takistust õigesti mõõta. Nagu on näidatud joonisel 2, R1, R2, R3, ja R4 on selle sildharud vastavalt. Kui sild on tasakaalus, R1xR3=R2xR4 on rahul. Kui sild on tasakaalust väljas, punktide a ja b vahel on pinge erinevus. Vastavalt punktide a ja b pingele, saab arvutada vastava takistuse. See on tasakaalustamata sillaga takistuse mõõtmise põhimõte:
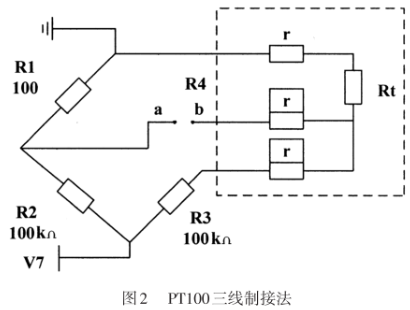
PT100 kolmejuhtmelise ahela ühendusmeetod
Tegelikult, PT100 väikese takistuse ja kõrge tundlikkuse tõttu, juhtjuhtme takistus põhjustab vigu. Seetõttu, Selle vea kõrvaldamiseks kasutatakse tööstuses sageli kolme juhtmega ühendamise meetodit. Nagu on näidatud joonise punktiirjoonel 2, juhtjuhtme takistuse väärtus on võrdne ja on r. Sel ajal, silla käed muutuvad R-ks, R, R+2r, ja Rt+2r. Kui sild on tasakaalus: R2. (R1+2r) =R1.(R3+2r), ära sorteeritud: Rt = R1R3/ R2+2 R1r/ R2- 2r. Analüüs näitab, et kui R1=R2, traadi takistuse muutus ei mõjuta mõõtmistulemust.
1.3 Kolme op-võimendi mõõteriistade võimendi ahel
Kui temperatuur muutub vahemikus 0 ℃ ~ 100 ℃, PT100 takistus muutub ligikaudu lineaarselt vahemikus 100Ω ~ 138,51Ω. Vastavalt ülaltoodud sillaahelale, sild on tasakaalus 0 ℃ juures, nii et silla väljundpinge teoreetiline väärtus peaks olema 0 V, ja kui temperatuur on 100 ℃, silla väljund on: Uab=U7x(R1/(R1 + R2)-R3/(R2 + R3)), see tähendab, Uab = 10x(138.51/(10000 + 138.51)-100/(10000 + 100)) =0,037599 V. Kuna see on millivolti signaal, seda pinget on vaja võimendada, et muuta see AD-kiibi poolt tuvastatavaks.
Nagu on näidatud joonisel 3, mõõteriistade võimendi on seade, mis võimendab väikseid signaale mürarikkas keskkonnas. Sellel on mitmeid eeliseid, näiteks väike triiv, madal energiatarve, kõrge tavarežiimi tagasilükkamise suhe, lai toiteallika valik ja väike suurus. See kasutab diferentsiaalsete väikeste signaalide omadusi, mis on peale kantud suurematele ühisrežiimi signaalidele, mis suudab samaaegselt eemaldada ühisrežiimi signaale ja võimendada diferentsiaalsignaale. Standardse kolme op-amp mõõteriistade võimendi ahela väljundpinge on, siin R8=R10 =20 kΩ, R9=R11=20 kΩ, R4=R7=100kΩ, mis suudab sisendpinge signaali võimendada umbes 150 korda, et silla teoreetilist väljundpinget saaks võimendada 0 ~2,34 V. Kuid see on ainult teoreetiline väärtus. Tegelikus protsessis, on palju tegureid, mis võivad põhjustada resistentsuse muutusi. Seetõttu, R3 saab asendada täpselt reguleeritava takistiga, et hõlbustada ahela nullimist.
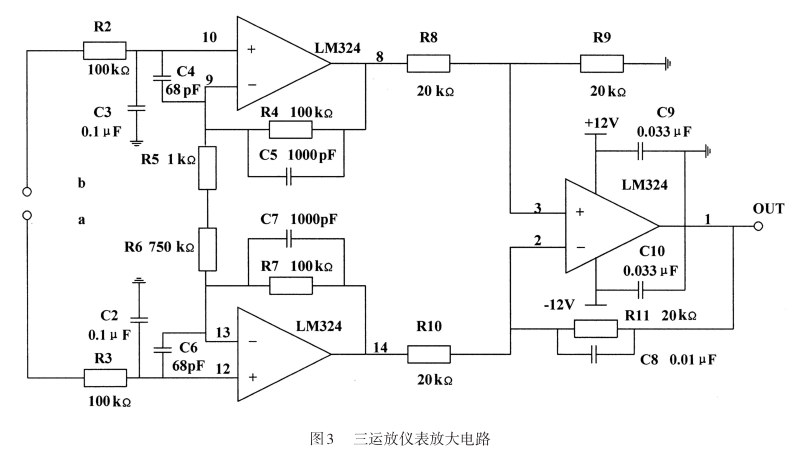
PT100 anduri kolme toiminguga võimendi instrumendi võimendi ahel
2. Tarkvara disain
2.1 Väiksemate ruutude meetod ja PT100 lineaarne sobitamine
Temperatuurivahemikus 0℃≤t≤850℃, seos Pt100 takistuse ja temperatuuri vahel on: R = 100 (1 +At+Bt2), kus A = 3,90802x 10-3; B=- -5.80x 10-7; C = 4,2735 x 10-12
On näha, et PT100 takistus ja temperatuur ei ole absoluutne lineaarne seos, vaid parabool. Seetõttu, kui t tuleb ekstraheerida, ruutjuure operatsioon on vajalik, mis toob sisse keerukama funktsioonioperatsiooni ja hõivab suure hulga ühekiibilise mikroarvuti CPU ressursse. Selle probleemi lahendamiseks, temperatuuri ja takistuse vahelise seose lineaarseks sobitamiseks saame kasutada vähimruutude meetodit. ” Vähimruutude kõvera sobitamine on levinud meetod eksperimentaalseks andmetöötluseks. Selle põhimõte on leida polünoomfunktsioon, et minimeerida algandmete ruutvigade summat.
2.2 AD digitaalne konversioonitemperatuur
PT100 temperatuuri mõõtmise põhimõte on saada temperatuuri väärtus selle takistuse väärtuse põhjal, seega tuleb kõigepealt määrata soojustakisti takistuse väärtus. Vastavalt riistvaraahelale, seos sillaahela väljundpinge Uab ja operatsioonivõimendi instrumendi võimendi ahela väljundpinge Uad vahel on: Uad = Uab. Auf Kuna süsteem kasutab 12-bitist AD-kiipi, seos digitaalsuuruse ja analoogsuuruse vahel on: Uad/AD=5/4096. Silla väljundpinge ja digitaalsuuruse AD vahelise seose saab kahe eelneva võrrandi kombineerimisel, see tähendab, Uad/AD=5/(4096Sees). Siis, see asendatakse silla väljundpinge avaldisega Uab= U7x (Rt/ (R1+Rt) -R3/ (R2+R3) ), ning Rr avaldise ja digitaalsuuruse AD saab saada. Lahendus on:

AD digitaalse konversioonitemperatuuri valem
Pärast PT100 takistuse väärtuse teadmist, vastava temperatuuri väärtuse saab vastavalt jaotises olevale lineaarsele sobitusvõrrandile 2.1.
2.3 Ühe kiibiga digitaalne filtreerimine
PT100 temperatuuri mõõtmise täpsuse parandamiseks, Tarkvara programmeerimisse saab lisada digitaalse filtreerimisprogrammi, mis ei nõua riistvaraahelate lisamist ning võib parandada süsteemi stabiilsust ja töökindlust. Ühekiibilises mikroarvutirakendussüsteemis on palju filtreerimismeetodeid. Konkreetse valiku tegemisel, tuleks analüüsida ja võrrelda filtreerimismeetodi ja rakendatavate objektide eeliseid ja puudusi, et valida sobiv filtreerimismeetod. Mediaankeskmise filtreerimismeetodi algoritmiks on kõigepealt koguda pidevalt N andmeid, seejärel eemaldage minimaalne väärtus ja maksimaalne väärtus, ja lõpuks arvutada ülejäänud andmete aritmeetiline keskmine. See filtreerimismeetod sobib aeglaselt muutuvate parameetrite mõõtmiseks, nagu temperatuur, ja võib tõhusalt vähendada juhuslikest teguritest põhjustatud kõikumisest või proovivõtu ebastabiilsusest põhjustatud vigadest põhjustatud häireid.
Süsteemi tööprotsess:
Kui mõõdetava objekti temperatuur muutub, PT100 takistus muutub, ja Wheatstone'i sild väljastab vastava pingesignaali. See signaal on PT100 takistuse funktsioon. Seda millivolti signaali võimendab kolme op-võimendiga instrumentaalvõimendi ja see saadetakse AD-kiibile, mis teisendab analoogsuuruse digitaalseks suuruseks ja mida loeb mikrokontroller. Mikrokontroller loeb AD kiibilt kiibi ja käivitab filtreerimisprogrammi, stabiilse digitaalsuuruse teisendamine PT100 takistuseks arvutamise teel. Seejärel valib mikrokontroller vastavalt takistuse suurusele vastava sobitatud lineaarse mudeli, et arvutada hetketemperatuur., ja lõpuks kuvada temperatuuriandmed LCD-ekraanil.