 English
English Afrikaans
Afrikaans العربية
العربية বাংলা
বাংলা bosanski jezik
bosanski jezik Български
Български Català
Català 粤语
粤语 中文(简体)
中文(简体) 中文(漢字)
中文(漢字) Hrvatski
Hrvatski Čeština
Čeština Nederlands
Nederlands Eesti keel
Eesti keel Suomi
Suomi Français
Français Deutsch
Deutsch Ελληνικά
Ελληνικά हिन्दी; हिंदी
हिन्दी; हिंदी Magyar
Magyar Bahasa Indonesia
Bahasa Indonesia Italiano
Italiano 日本語
日本語 한국어
한국어 Latviešu valoda
Latviešu valoda Lietuvių kalba
Lietuvių kalba македонски јазик
македонски јазик Bahasa Melayu
Bahasa Melayu Norsk
Norsk پارسی
پارسی Polski
Polski Português
Português Română
Română Русский
Русский Cрпски језик
Cрпски језик Slovenčina
Slovenčina Slovenščina
Slovenščina Español
Español Svenska
Svenska ภาษาไทย
ภาษาไทย Türkçe
Türkçe Українська
Українська اردو
اردو Tiếng Việt
Tiếng Việt
Artiklis tutvustatakse, kuidas 2, 3, ja 4-juhtmelised PT100 andurid muudetakse takistuse muutuste kaudu pingesignaalideks, anduri kaitsmiseks ja signaali muundamise täpsuse tagamiseks kasutatakse konstantset vooluallikat. PT100 andur omandab temperatuuri, mõõtes selle elektritakistuse muutust, mis on otseses korrelatsioonis temperatuuriga, millega see kokku puutub; kui temperatuur tõuseb, suureneb ka anduri sees oleva plaatinaelemendi takistus, mis võimaldab selle takistuse muutuse põhjal temperatuuri täpselt arvutada; sisuliselt, a “100” PT100-s tähendab, et anduri takistus on 100 oomi temperatuuril 0 °C, ja see väärtus muutub etteaimatavalt koos temperatuuri kõikumisega. Operatsioonivõimendi MCP604 rakendamine vooluahela kujundamisel rõhutab selle omaduste, nagu madal sisendi nihkepinge ja nihkevool, mõju täpsusele. Tarkvara kalibreerimist kasutatakse vooluahela kavandamise täpsuse parandamiseks, füüsilise kohandamisega kaasnevate ebamugavuste vältimine. Lõpuks, artikkel annab seose temperatuuri ja plaatina takistuse väärtuse vahel, mida kasutatakse temperatuuri väärtuse arvutamiseks.
 2-juhtmelise PT100 temperatuurianduri temperatuurianduri disain |
 Hiina kohandatud 3-juhtmelise PT100 temperatuurianduri temperatuuri mõõtmine |
 4-juhtmelise PT100 temperatuurianduri temperatuuri mõõtmine |
Põhipunktid PT100 temperatuuri mõõtmise kohta:
Vastupidavuse temperatuuri detektor (RTD):
PT100 on teatud tüüpi RTD, See tähendab, et see mõõdab temperatuuri, tuvastades selle elektritakistuse muutusi.
Plaatina element:
PT100 sensorelement on valmistatud plaatinast, millel on väga stabiilne ja lineaarne seos takistuse ja temperatuuri vahel.
Mõõtmisprotsess: Andur asetatakse keskkonda, kus on vaja temperatuuri mõõta.
Plaatinaelemendi takistust mõõdetakse spetsiaalse elektroonilise vooluringi abil.
Mõõdetud takistuse väärtus teisendatakse seejärel temperatuuriks, kasutades plaatina teadaoleval temperatuurikoefitsiendil põhinevat matemaatilist valemit..
PT100 andurite eelised:
Kõrge täpsus: Plaatina stabiilse käitumise tõttu peetakse seda üheks kõige täpsemaks saadaolevaks temperatuurianduriks.
Lai temperatuurivahemik: Saab mõõta temperatuure vahemikus -200°C kuni 850°C olenevalt anduri konstruktsioonist.
Hea lineaarsus: Takistuse ja temperatuuri suhe on suhteliselt lineaarne, andmete tõlgendamise lihtsustamine.
Olulised kaalutlused:
Kalibreerimine: Täpse mõõtmise tagamiseks, PT100 andureid tuleb regulaarselt võrdlusstandardi järgi kalibreerida.
Pliijuhtme takistus: Ühendusjuhtmete takistus võib mõõtmise täpsust mõjutada, nii et sageli on vaja juhtme kompenseerimist korralikult kaaluda.
Rakenduse sobivus: Kuigi väga täpne, PT100 andurid ei pruugi sobida väga karmidesse keskkondadesse või rakendustesse, mis nõuavad väga kiiret reageerimisaega.
1. Signaali omandamise põhiprintsiibid
PT100 teisendab temperatuurisignaalid takistusväljunditeks, ja selle takistuse väärtus on vahemikus 0 kuni 200Ω. AD-muundur suudab teisendada ainult pinget ega saa otseselt temperatuuri koguda. Seetõttu, PT100 toiteks ja takistuse muutuste teisendamiseks pingemuutusteks on vaja 1 mA konstantse voolu allikat. Püsivooluallika kasutamise eeliseks on see, et see võib pikendada anduri eluiga. Kuna sisendsignaali vahemik on 0 kuni 200mV, elektrisignaali andmete saamiseks tuleb signaali võimendada ja seejärel AD teisendada.
Pideva pingeallika disaini mittekasutamise põhjused:
Kui toiteallikana kasutatakse konstantse pinge allikat, ja seejärel ühendatakse takisti ja PT100 järjestikku, ja pinge on jagatud, on probleem. Kui PT100 takistus on liiga väike, PT100 läbiv vool on liiga suur, mille tulemuseks on anduri lühem eluiga.
2. Operatsioonivõimendi kasutab MCP604
MCP604 omadused:
1) Pingevahemik on 2,7–6,0 V
2) Väljund on raudteest raudteele
3) Töötemperatuuri vahemik: -40°C kuni +85 °C
4) Sisendnihkepinge on ±3mV, tüüpiline väärtus on 1 mV, kõrge tundlikkus.
5) Sisendpingestusvool on 1pA, kui TA = +85°C, I = 20 pA, parandab omandamise täpsust.
6) Lineaarne väljundpinge kõikumine: VSS+0.1 ~ VDD–0.1, üksus on V.
Kui toitepinge on 3,3 V, lineaarne väljundpinge kõikumine on 0,1–3,2 V. Tagamaks, et võimendatud signaal toimiks lineaarses piirkonnas, kui VDD = 3,3 V, seadsime MCP604 väljundpinge jääma väärtusele: 0.5V ~ 2,5 V, et vastata operatsioonivõimendi vooluahela konstruktsiooni nõuetele.
Analoogelektroonika raamatus olev opvõimendi on ideaalne operatiivvõimendi, mis erineb tegelikust võimendist. Seetõttu, on vaja kaaluda “sisendi nihkepinge”, “sisendi eelpingestusvool” ja “lineaarne väljundpinge kõikumine” projekteerimisel.
3. Vooluskeem
Joonisel kujutatud R11 on nihkeahel, mis hoiab ära diferentsiaalvõimendi väljundi viimase etapi küllastusmoonutuste eest.
1) Väljundvea vähendamiseks valige sobiv võimendustegur. Sisendnihkepinge olemasolu tõttu, kui võimendustegur suureneb, suureneb ka väljundviga, mida tuleb projekteerimisel arvestada.
2) Selle ahela võimendustegur on 10. Eeldusel, et tüüpiline sisendi nihkepinge on 3 mV, kui sisendsignaal muutub 5 mV-ks, 2mV ei võimendata, mis tekitab 20 mV väljundvea.
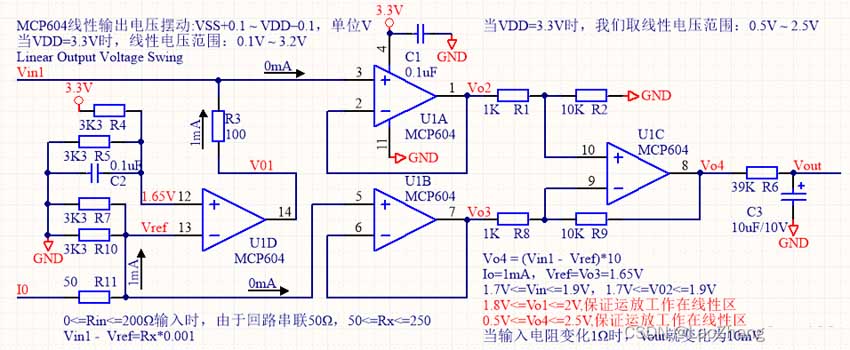
PT100 temperatuuridetektori operatsioonivõimendi, kasutades MCP604 vooluringi
Vo4 = (Vin1 – Vref)*10
I = 1 mA, Vref=Vo3=1,65V
1.7V<=Vin<= 1,9 V, 1.7V<=V02<=1,9
1.8V<=Vo1<= 2 V, veenduge, et operatsioonivõimendi töötab lineaarses piirkonnas, see on väga oluline
0.5V<=Vo4<= 2,5 V, veenduge, et operatsioonivõimendi töötab lineaarses piirkonnas, seepärast on vaja järjestikku 50Ω.
Kui sisendtakistus muutub 1Ω võrra, Vout muutub 10mV peale. Kuna MCP604 sisendi kompensatsioonipinge on ±3 mV, kui toimub muutus 0,3333Ω, toimub muutus 3,333mV, ja omandamise tundlikkus on kõrge.
Kui 0<=Rin<=200Ω sisend, kuna silmus on ühendatud järjestikku 50Ω-ga, 50Oh<=Rx<=250Ω
Vin1 – Vref = Rx*0,001, üksus A
4. Tarkvara kalibreerimine
Uued insenerid püüavad alati parandada takistite täpsust, aga viga on ikka suur. Mõned insenerid kasutavad lihtsalt pidevalt reguleeritavaid takisteid, reguleerida nende takistuse väärtusi, ja kasutage multimeetreid, et väljund vastaks ülekandesuhtele. See täpsus näib olevat paranenud, kuid see pole tootmiseks mugav, ja PCB projekteerimise raskus on samuti suurenenud. Isegi kui silumine on tehtud, kui reguleerimiskruvi puudutatakse käega, see võib põhjustada vigu. Ainus võimalus on kasutada tootmiseks fikseeritud takisteid ja kasutada tarkvara, mis aitab saavutada täpset kalibreerimist.
1) Kui Rin=0, lugege pinge väärtust ja registreerige see kui V50. Säästke V50, see ei muutu PT100 takistuse väärtuse muutumisel, kuna seda toidab konstantne vooluallikas.
2) Ühendage nominaalne takisti, olgu Rs = 100Ω, lugege pinge väärtust ja registreerige see kui V150. Säästke V150, pinge väärtus loetakse, kui temperatuur on 0.
3) Arvutage voolu võimendustegur: Io = (V150 – V50) / Rs; päästa Mind, see tähendab, et kalibreerimine on tehtud.
4) Kui sisendtakistus on R, pinge näit on Vo, siis R = (Vo- V50) / Io
Ülaltoodud kirjelduse kaudu, tarkvara kalibreerimisel on suured eelised, mitte ainult mugav tootmine, aga ka kõrge täpsus. Täpsuse parandamiseks, väljundpinge võib jagada ka mitmeks intervalliks, eraldi kalibreeritud, ja erinevaid Io saab saada, nii et väljundi lineaarsus oleks parem. Need ideed kajastuvad minu disainis.
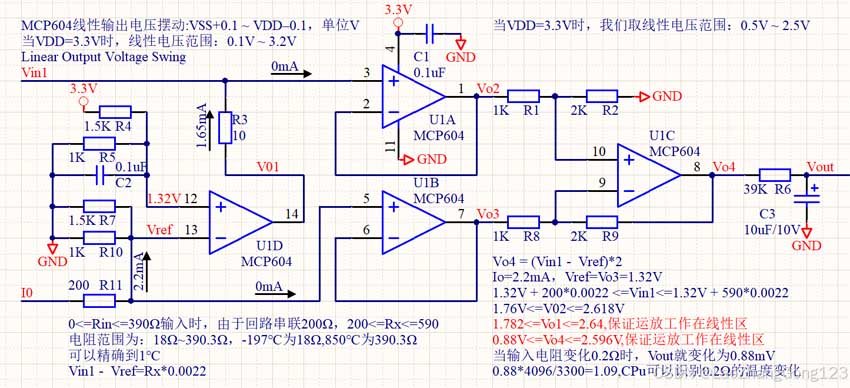
OP AMP MCP604 vooluahela disain
5. Arvutage temperatuur
Kui temperatuur on alla 0,
R0*C*t^4 – 100R0*C*t^3 + R0*B*t^2 + R0*A*t + R0 – Rt = 0
Kui temperatuur on suurem või võrdne 0, Rt=R0*(1+A*t+B*t*t)
Kirjeldus:
Rt on plaatinatakisti takistuse väärtus t℃ juures
R0 on plaatinatakisti takistuse väärtus 0℃ 100Ω juures
A = 3,9082 × 10^-3
B = -5,80195 × 10^-7
C = -4,2735 × 10^-12
6. Pt100 temperatuuriandur
Pt100 temperatuuriandur on positiivse temperatuurikoefitsiendiga termistorandur, ja selle peamised tehnilised parameetrid on järgmised:
1) Mõõtmistemperatuuri vahemik: -200℃ ~ +850 ℃;
2) Lubatud hälbe väärtus Δ℃: Hinne A ±(0.15+0.002|t|), Hinne B ±(0.30+0.005|t|);
3) Minimaalne sisestussügavus: Termotakisti minimaalne sisestussügavus on ≥200mm;
4) Lubatud vool: < 5mA;
5) Pt100 temperatuurianduril on ka vibratsioonikindluse eelised, hea stabiilsus, kõrge täpsus, ja kõrge rõhk. Plaatina termiline takisti on hea lineaarsusega. Vahel vahetades 0 ja 100 kraadi Celsiuse järgi, maksimaalne mittelineaarne hälve on väiksem kui 0,5 ℃;
Kui temperatuur < 0, R0*C*t^4 – 100R0*C*t^3 + R0*B*t^2 + R0*A*t + R0 – Rt = 0
Kui temperatuur ≥ 0, Rt = R0*(1+A*t+B*t*t)
Vastavalt ülaltoodud suhtele, ligikaudne takistusvahemik on: 18Ω~390,3Ω, -197℃ on 18Ω, 850Ω on 390,3 Ω;
Kirjeldus:
Rt on plaatinatakisti takistuse väärtus t℃ juures, R0 on plaatinatakisti takistuse väärtus temperatuuril 0 ℃, 100Oh
A = 3,9082 × 10^-3, B = -5,80195 × 10^-7, C = -4,2735 × 10^-12
PT100 plaatina metallist temperatuurianduri kasutusjuhend
6) Vooluahela disain
7) PT100 temperatuuri ja takistuse vaheline seos
PT100 temperatuur ja takistus vastavad järgmisele võrrandile:
Kui temperatuur ≤0, R0*C*t^4 – 100*R0*C*t^3 + R0*B*t^2 + R0*A*t + R0 – Rt = 0
Kui temperatuur ≥0, R0*B*t^2 + R0*A*t + R0 – Rt = 0
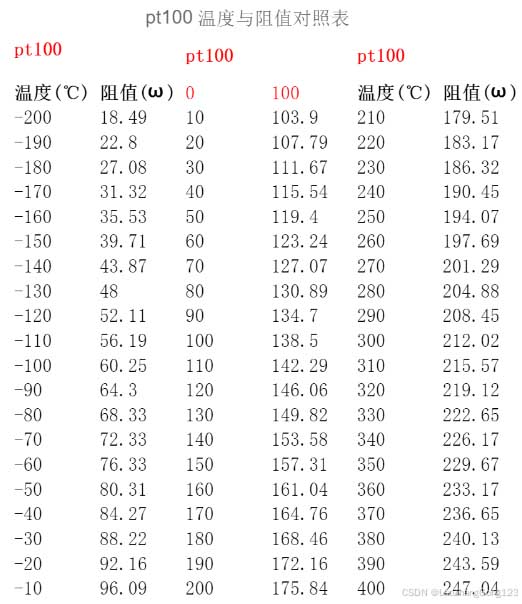
PT100 temperatuuri ja takistuse võrdlustabel
Kirjeldus:
Rt on plaatinatakisti takistuse väärtus t℃ juures, R0 on plaatinatakisti takistuse väärtus temperatuuril 0 ℃, 100Oh
A = 3,9082 × 10^-3, B = -5,80195 × 10^-7, C = -4,2735 × 10^-12
1. Arvutamise mugavuse huvides, kui temperatuur on ≤0, lase:
topelt a=R0*C*100000=100*(-4.2735× 10^-12)*100000=-4,2735/100000
kahekordne b=–100*R0*C*100000=–100*100*(-4.2735× 10^-12)*100000=4,2735/1000
topelt c= R0*B*100000=100*(-5.80195× 10^-7)*100000=-5,80195
kahekordne d=R0*A*100000=100*(3.9082× 10^-3)*100000=39082
kahekordne e= (100-Rt)*100000
Kui temperatuur ≤ 0, a*t^4 + b*t^3 + c*t^2 + d*t + e=0
kus x3 on PT100 lahus, kui see on alla 0 ℃.
2. Arvutamise hõlbustamiseks, kui temperatuur on suurem või võrdne 0
topelt a= R0*B*100000=100*(-5.80195× 10^-7)*100000=-5,80195
topelt b=R0*A*100000=100*(3.9082× 10^-3)*100000=39082
topelt c= (100-Rt)*100000
Kui temperatuur on ≥0, a*t^2 + b*t + c = 0
t = [ SQRT( b*b – 4*a*c )-b ] / 2 / a
19.785Ω vastab -197 ℃, vedela lämmastiku temperatuur
18.486Ω vastab -200 ℃
96.085Ω vastab -10 ℃
138.505Ω vastab 100 ℃
175.845Ω vastab 200 ℃
247.045Ω vastab 400 ℃