 English
English Afrikaans
Afrikaans العربية
العربية বাংলা
বাংলা bosanski jezik
bosanski jezik Български
Български Català
Català 粤语
粤语 中文(简体)
中文(简体) 中文(漢字)
中文(漢字) Hrvatski
Hrvatski Čeština
Čeština Nederlands
Nederlands Eesti keel
Eesti keel Suomi
Suomi Français
Français Deutsch
Deutsch Ελληνικά
Ελληνικά हिन्दी; हिंदी
हिन्दी; हिंदी Magyar
Magyar Bahasa Indonesia
Bahasa Indonesia Italiano
Italiano 日本語
日本語 한국어
한국어 Latviešu valoda
Latviešu valoda Lietuvių kalba
Lietuvių kalba македонски јазик
македонски јазик Bahasa Melayu
Bahasa Melayu Norsk
Norsk پارسی
پارسی Polski
Polski Português
Português Română
Română Русский
Русский Cрпски језик
Cрпски језик Slovenčina
Slovenčina Slovenščina
Slovenščina Español
Español Svenska
Svenska ภาษาไทย
ภาษาไทย Türkçe
Türkçe Українська
Українська اردو
اردو Tiếng Việt
Tiếng Việt
DS18B20是数字温度传感器,使用单总线时序与主机通信. 仅有的 1 需要接线才能完成温度数据读取;
DS18B20内置64位产品序列号,方便识别. 可连接多个 DS18B20 传感器 1 金属丝, 并通过64位身份认证, 可分别读取不同传感器采集的温度信息.
 DS18B20 温度传感线不锈钢探头套件 |
 DS18B20 温度传感器探头 TPE 包覆成型套件 |
 1 线控DS18B20温度传感器 |
DS18B20简介
2.1 DS18B20的主要特点
1. 全数字温度转换和输出.
2. 先进的单总线数据通信.
3. 高达 12 位分辨率, 精度高达±0.5摄氏度.
4. 12 位分辨率下的最大工作周期为 750 毫秒.
5. 可选择寄生工作模式.
6. 检测温度范围 –55°C ~+125°C (–67°F ~+257°F).
7. 内置EEPROM, 温度超限报警功能.
8. 64-位光刻ROM, 内置产品序列号, 方便多机连接.
9. 多种包装形式, 适应不同的硬件系统.
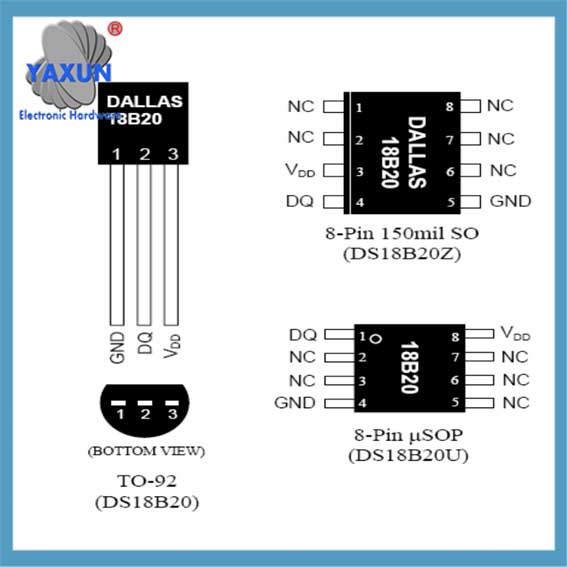
DS18B20芯片封装结构
2.2 DS18B20引脚功能
GND 电压地;
DQ单数据总线;
VDD电源电压;
NC空针;
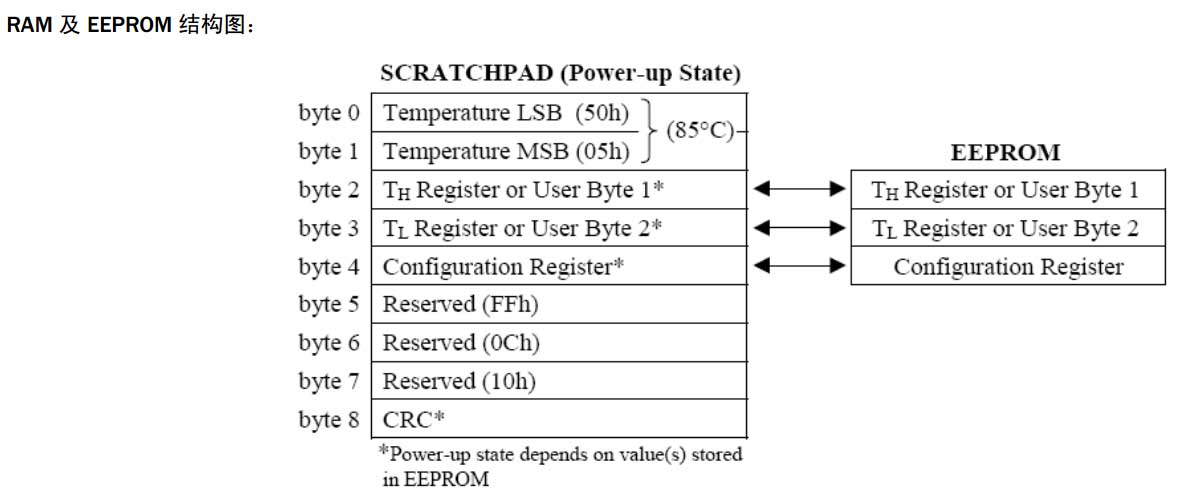
DS18B20芯片RAM和EEPROM结构图
2.3 DS18B20工作原理及应用
DS18B20 温度检测和数字数据输出完全集成在一颗芯片上, 因此具有更强的抗干扰能力. 其一个工作循环可分为两个部分, 即温度检测和数据处理.
18B20具有三种形式的内存资源. 他们是: ROM只读存储器, 用于存储DS18B20ID码; 第一个 8 位是单行系列代码 (DS18B20代码为19H), 下列 48 位是芯片的唯一序列号; 最后一个 8 位是 CRC 码 (冗余校验) 上述的 56 位. 数据在生产时设置,用户无法更改. DS18B20共有 64 ROM 位.
RAM数据寄存器, 用于内部计算和数据访问, 断电后数据丢失, DS18B20共有 9 RAM 字节, 每个字节是 8 位. 第一、二字节为温度转换后的数据值信息; 第三和第四字节是用户EEPROM的镜像 (常用于温度报警值存储). 当电源复位时其值会被刷新. 第五个字节是用户第三个EEPROM的镜像. 第六号, 7th, 第8个字节是计数寄存器, 旨在让用户获得更高的温度分辨率. 它们也是内部温度转换和计算的临时存储单元. 第9个字节是第一个字节的CRC码 8 字节. EEPROM是一种非易失性存储器,用于存储需要长期保存的数据, 上、下温度报警值, 和验证数据. DS18B20共有 3 EEPROM 位, RAM中有镜像,方便用户操作.
DS18B20默认工作在12位分辨率模式. 转换后得到的12位数据存储在DS18B20的两个8位RAM中 (前两个字节). 第一个 5 二进制中的位是符号位. 如果测量的温度大于 0, 这些 5 位是 0. 只需将测量值乘以 0.0625 获取实际温度. 如果温度低于 0, 这些 5 位是 1. 测量值需要取反, 添加者 1, 然后乘以 0.0625 获取实际温度. 或者使用位运算提取温度: 小数点占据较低位 4 位, 高位为整数位 (不考虑负数).
2.4 DS18B20芯片ROM指令表
1. 读取ROM [33H] (十六进制命令字在方括号中).
该命令允许总线控制器读取DS18B20的64位ROM. 该指令仅当总线上只有一个DS18B20时才能使用. 如果连接了多个, 通信过程中会出现数据冲突.
2. 补丁ROM [55H]
该指令后面跟着控制器发出的 64 位序列号. 当总线上有多个DS18B20时, 只有与控制器发出的序列号相同的芯片才能响应, 其他芯片将等待下一次复位. 该指令适用于单片机和多片机连接.
3. 跳过ROM [中西医结合中心]
该指令使芯片不响应ROM代码. 单总线情况下, 该指令可用于节省时间. 如果连接多个芯片时使用该指令, 会发生数据冲突, 导致错误.
4. 搜索ROM [调频]
芯片初始化后, 当多个芯片连接到总线上时,搜索指令允许通过消除来识别所有设备的64位ROM.
5. 报警搜索 [每个]
多芯片情况下, 报警芯片搜索指令只响应满足温度高于TH或低于TL报警条件的芯片. 只要芯片没有断电, 报警状态将一直保持,直到再次测量温度且未达到报警条件为止.
6. 写便签本 [4埃希]
这是将数据写入RAM的指令. 随后写入的两个字节数据将存储在地址 2 (报警RAM的TH) 和地址 3 (报警RAM的TL). 写过程可以通过复位信号终止.
7. 阅读便签本 (从 RAM 中读取数据) [贝赫]
该指令将从 RAM 中读取数据, 从地址开始 0 直至地址 9, 完成整个RAM数据的读取. 芯片允许复位信号终止读取过程, 那是, 可以忽略后续不必要的字节以减少读取时间.
8. 复制便签本 (将 RAM 数据复制到 EEPROM) [48H]
该指令将RAM中的数据存储到EEPROM中,这样断电时数据不会丢失. 由于芯片正忙于 EEPROM 存储处理, 当控制器发送读时隙时, 总线输出 “0”, 当存储工作完成时, 总线将输出 “1”.
寄生工作模式, 该指令发出后必须立即使用强上拉并保持至少10MS以维持芯片运行.
9. 转换 T (温度转换) [44H]
收到此指令后, 芯片将进行温度转换并将转换后的温度值存储在RAM的第1和第2地址中. 由于芯片正忙于温度转换处理, 当控制器发送读时隙时, 总线输出 “0”, 当存储工作完成时, 总线将输出 “1”. 寄生工作模式, 该指令发出后必须立即使用强上拉并保持至少 500MS 以维持芯片运行.
10. 召回EEPROM (将EEPROM中的报警值复制到RAM中) [B8H]
该指令将EEPROM中的报警值复制到RAM中的第3和第4字节. 由于芯片正忙于复制处理, 当控制器发送读时隙时, 总线输出 “0”, 当存储工作完成时, 总线输出 “1”. 此外, 该指令在芯片上电复位时会自动执行. 这样, RAM 中的两个报警字节位始终是 EEPROM 中数据的镜像.
11. 读取电源 (工作模式切换) [B4H]
此指令发出后, 发出读取时间间隙, 芯片将返回其电源状态字. “0” 是寄生功率状态并且 “1” 是外部电源状态.
2.5 DS18B20时序图
2.5.1 DS18B20复位与响应关系图
每次通信之前必须执行重置. 重置时间, 等待时间, 响应时间应严格按照时间安排.
DS18B20读写时间间隙: DS18B20数据读写是通过时间间隙处理位和命令字来交换信息来确认的.

DS18B20复位与响应关系图
2.5.2 写入数据 0 和数据 1 至 DS18B20
在写数据时间间隙的前15uS内, 总线需要被控制器拉低, 然后就是芯片对总线数据的采样时间. 采样时间15~60uS. 如果控制器在采样时间内将总线拉高, 这意味着写作 “1”, 如果控制器将总线拉低, 这意味着写作 “0”.
每一位传输应有至少15uS的低电平起始位, 以及后续数据 “0” 或者 “1” 应在45uS内完成.
整个bit的传输时间应保持在60~120uS, 否则无法保证正常通讯.
笔记: DS18B20从低位开始读写数据.
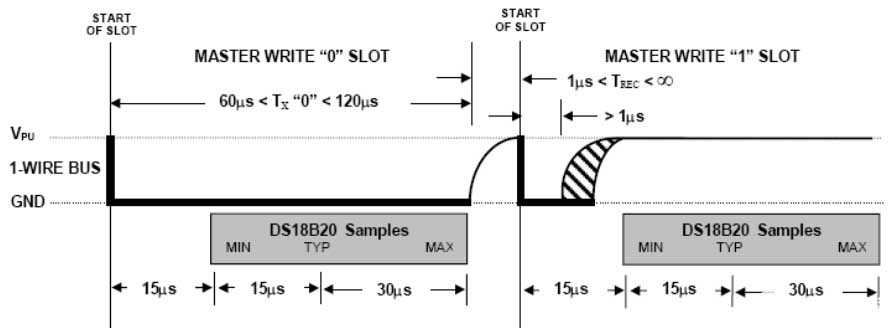
写入数据 0 和数据 1 至 DS18B20
2.5.3 读取数据 0 和数据 1 来自 DS18B20
读取时间间隙期间控件的采样时间应该更准确. 在读取时间间隔期间, 主机还必须产生至少1uS的低电平来指示读取时间的开始. 然后, 总线释放后15uS内, DS18B20将发送内部数据位. 此时, 如果控制器发现总线为高电平, 这意味着阅读 “1”, 如果总线很低, 意思是读取数据 “0”. 读取每一位之前, 控制器添加启动信号.
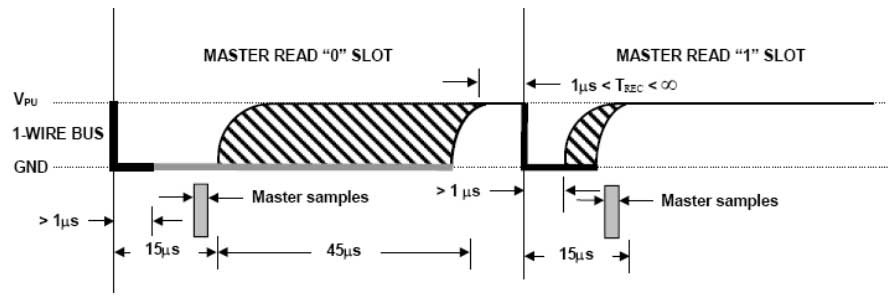
读取数据 0 和数据 1 来自 DS18B20
笔记: 数据位必须在读取间隙开始后 15uS 内读取,以确保正确通信.
沟通过程中, 8 的位 “0” 或者 “1” 被用作一个字节, 并且字节的读或写是从低位开始的.
2.5.4 一次读取温度顺序 (总线上只有一个 DS18B20)
1. 发送复位信号
2. 检测响应信号
3. 发送0xCC
4. 发送0x44
5. 发送复位信号
6. 检测响应信号
7. 写入0xcc
8. 写入0xbe
9. 环形 8 读取温度低字节的次数
10. 环形 8 读取温度高字节的次数
11. 合成16位温度数据并处理
3. 驱动程序代码
3.1 DS18B20.c
#包括 “ds18b20.h”
/*
功能: DS18B20初始化
硬件连接: PB15
*/
无效 DS18B20_Init(空白)
{
RCC->APB2ENR|=1<<3; //PB
GPIOB->CRH&=0x0FFFFFFF;
GPIOB->CRH|=0x30000000;
GPIOB->奥德罗|=1<<15; //引体向上
}
/*
功能: 检查DS18B20设备是否存在
返回值: 1 表示设备不存在 0 表示设备正常
*/
u8 DS18B20_CheckDevice(空白) //包含复位脉冲, 检测脉冲
{
DS18B20_输出_模式();//初始化为输出模式
DS18B20_OUT=0; //产生复位脉冲
耽误我们(750); //产生750us低电平
DS18B20_OUT=1; //发布总线
耽误我们(15); //等待DS18B20响应
如果(DS18B20_CleckAck())//检测存在脉冲
{
返回 1;
}
返回 0;
}
/*
功能: 检测DS18B20器件的存在脉冲
返回值: 1 表示错误 0 表示正常
*/
u8 DS18B20_CleckAck(空白)
{
u8 碳纳米管=0;
DS18B20_输入模式();//初始化为输入模式
尽管(DS18B20_IN&&碳纳米管<200) //等待DS18B20响应存在脉冲
{
耽误我们(1);
cnt++;
}
如果(碳纳米管>=200)返回 1; //错误
碳纳米管=0;
尽管((!DS18B20_IN)&&碳纳米管<240) //等待DS18B20释放总线
{
耽误我们(1);
cnt++;
}
如果(碳纳米管>=240)返回 1; //错误
返回 0;
}
/*
功能: 写入一个字节
首先学习如何写一点.
*/
无效 DS18B20_WriteByte(u8命令)
{
u8我;
DS18B20_输出_模式(); //初始化为输出模式
为了(我=0;我<8;我++)
{
DS18B20_OUT=0; //生成写入时间间隙 (写开始)
耽误我们(2);
DS18B20_OUT=cmd&0x01; //发送实际数据位
耽误我们(60); //等待写入完成
DS18B20_OUT=1; //释放总线并准备下一次传输
指令>>=1; //继续发送下一位数据
}
}
/*
功能: 读取一个字节
首先学习如何阅读.
*/
u8 DS18B20_ReadByte(空白)
{
u8我,数据=0;
为了(我=0;我<8;我++)
{
DS18B20_输出_模式(); //初始化为输出模式
DS18B20_OUT=0; //生成读取时间间隙 (读开始)
耽误我们(2);
DS18B20_OUT=1; //发布总线
DS18B20_输入模式(); //初始化为输入模式
耽误我们(8); //等待DS18B20数据输出
数据>>=1; //填充高位 0, 默认是 0
如果(DS18B20_IN) 数据|=0x80;
耽误我们(60);
DS18B20_OUT=1; //发布总线, 等待读取下一位数据
}
返回数据;
}
/*
功能: 读取一次DS18B20的温度数据
返回值: 读取的温度数据
考虑的情况: 总线上只有一个DS18B20
*/
u16 DS18B20_ReadTemp(空白)
{
u16 温度=0;
u8 温度_H,温度_L;
DS18B20_检查设备(); //发送复位脉冲, 检测脉搏
DS18B20_WriteByte(0xCC); //跳过 ROM 序列检测
DS18B20_WriteByte(0x44); //开始温度转换
//等待温度转换完成
尽管(DS18B20_读字节()!=0xFF){}
DS18B20_检查设备(); //发送复位脉冲, 检测脉搏
DS18B20_WriteByte(0xCC); //跳过 ROM 序列检测
DS18B20_WriteByte(0乙醚); //读取温度
temp_L=DS18B20_ReadByte(); //读取低温数据
temp_H=DS18B20_ReadByte(); //读取高温数据
温度=temp_L|(温度_H<<8); //合成温度
返回温度;
}
3.2 DS18B20.h
#ifndef DS18B20_H
#定义DS18B20_H
#包括 “stm32f10x.h”
#包括 “系统文件h”
#包括 “延迟.h”
#包括 “ds18b20.h”
#包括 “usart.h”
/*封装接口*/
//将 DS18B20 初始化为输入模式
#定义DS18B20_INPUT_MODE() {GPIOB->CRH&=0x0FFFFFFF;GPIOB->CRH|=0x80000000;}
//将 DS18B20 初始化为输出模式
#定义DS18B20_OUTPUT_MODE(){GPIOB->CRH&=0x0FFFFFFF;GPIOB->CRH|=0x30000000;}
//DS18B20 IO口输出
#定义 DS18B20_OUT PBout(15)
//DS18B20 IO口输入
#定义 DS18B20_IN PBin(15)
//函数声明
u8 DS18B20_CleckAck(空白);
u8 DS18B20_CheckDevice(空白);
无效 DS18B20_Init(空白);
u16 DS18B20_ReadTemp(空白);
u8 DS18B20_ReadByte(空白);
无效 DS18B20_WriteByte(u8命令);
#恩迪夫
poYBAGDYdXCAWkKMAAAK8RNs4s030.png
3.3 延时功能
/*
功能: 我们的延误
*/
无效延迟(国际我们)
{
#ifdef _SYSTICK_IRQ_
整数我,j;
为了(我=0;iVAL=0; //CNT计数器值
系统标记->负载=9*us; //9 表示1us
系统标记->控制键|=1<<0; //启动定时器
做
{
tmp=SysTick->控制键; //读取状态
}尽管((!(tmp&1<<16))&&(tmp&1<<0));
系统标记->值=0; //CNT计数器值
系统标记->控制键&=~(1<<0); //关闭定时器
#恩迪夫
};我++)>
3.4 main.c 调用DS18B20读取温度并打印到串口
#包括 “stm32f10x.h”
#包括 “ds18b20.h”
u8 DS18B20_ROM[8]; //存储DS18B20的64位ROM代码
整型主(空白)
{
u16 温度;
USARTx_Heat(USART1,72,115200);//串口初始化 1
DS18B20_热(); //DS18B20初始化
/*1. 读取DS18B20的64位ROM代码*/
//发送复位脉冲, 检测存在脉冲
尽管(DS18B20_检查设备())
{
打印函数(“DS18B20设备不存在!\n”);
延迟时间(500);
}
//发送命令读取64位ROM代码
DS18B20_WriteByte(0x33);
//循环读取64位ROM代码
为了(我=0;我<8;我++)
{
DS18B20_ROM[我]= DS18B20_ReadByte();
打印函数(“DS18B20_ROM[%d]=0x%Xn”,我,DS18B20_ROM[我]);
}
尽管(1)
{
/*2. 同时操作总线上所有DS18B20开始转换温度*/
DS18B20_检查设备(); //发送复位脉冲, 检测脉搏
DS18B20_WriteByte(0xCC); //跳过 ROM 序列检测
DS18B20_WriteByte(0x44); //开始温度转换 (让总线上的所有DS18B20转换温度)
延迟时间(500); //等待线上所有DS18B20温度转换完成
/*3. 单次定向读取每个 DS18B20 的温度*/
DS18B20_检查设备(); //发送复位脉冲, 检测脉搏
DS18B20_WriteByte(0x55); //发送命令匹配ROM
为了(我=0;我<8;我++) //发送 64 位代码
{
DS18B20_WriteByte(DS18B20_ROM[我]);
}
DS18B20_WriteByte(0乙醚); //读取温度
临时=DS18B20_ReadByte(); //读取低阶温度数据
温度|=DS18B20_ReadByte()<<8; //读取高阶温度数据
打印函数(“temp1=%d.%dn”,温度>>4,温度&0xF);
打印函数(“温度2=%fn”,温度*0.0625);
延迟时间(500);
}
}